Obstacle avoidance is an aspect of navigation for a robot or autonomous vehicle. High-level navigationlooks for principal goals, landmarks or waypoints (global planning), but the route towards the next waypoint may incldue varios obtacles, some staionary (such as rocks or lamposts), some moving (such as people or other robots). Obstacle avoidance seeks to create a path that avoids bumping into those obstacles along the way (local planning).
Used in Chap. 15: pages 226, 227, 234, 235; Chap. 16: page 246
Also known as: avoidance mechanisms, avoidance rules
Used in glossary entries: autonomous vehicle, global planning, local planning, robotics
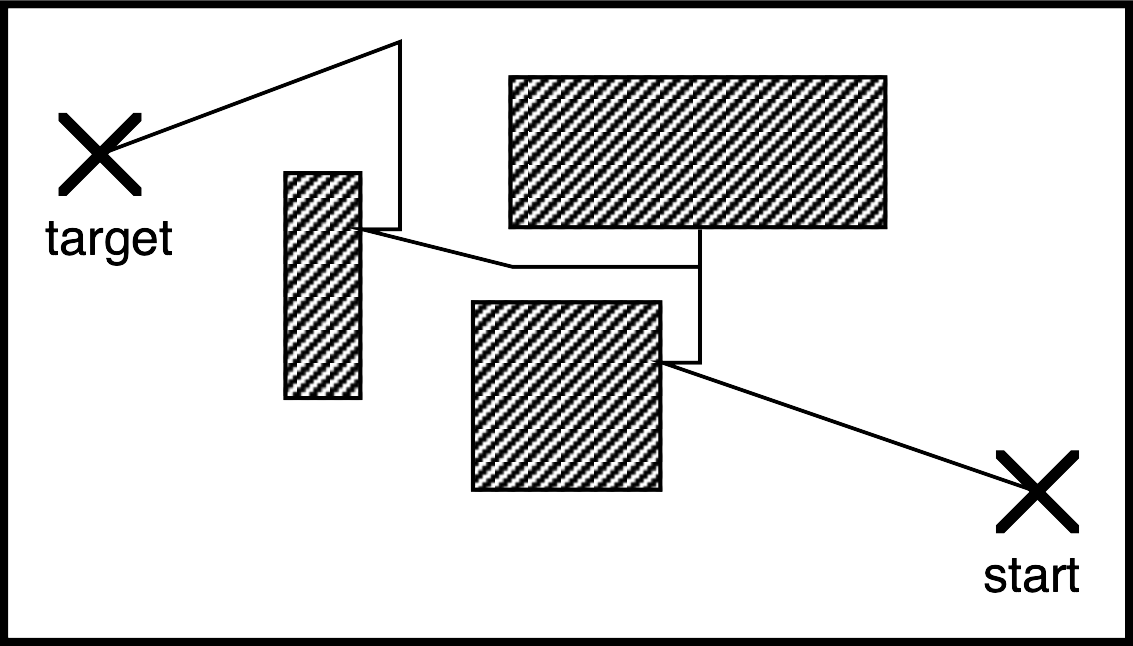
Local planning to avoid obstacles
Avoiding moving objects